







 Thank you for taking time out of your busy schedule to click through our Virtual Engineering Design EXPO!
Thank you for taking time out of your busy schedule to click through our Virtual Engineering Design EXPO!
Each year, our Senior Design students design, build, test, and repeat until they create a product we are all proud to display at our EXPO. This year’s cohort had to face exceptional challenges in pursuit of their final designs.
We are prouder than ever of their accomplishments and wish that we could gather in celebration, as we have in the past. However, this new platform gives us the opportunity to reach an even broader audience this year.
I have marveled as projects have grown in complexity and sophistication every year since the EXPO’s inception. As you browse the 20 projects on display this year, you will find that our students, faculty, mentors, and sponsors decided not to let extenuating circumstances get in the way of continuing that trend. This display is a testament to the resilience of the SUNY New Paltz Engineering community.
I would like to extend a very special thank you to our Engineering Design EXPO sponsors:
ELNA Magnetics | Bantam Tools | GeoSync Microwave, Inc.
Without their support, we would not be able to produce such professional projects.
Congratulations to all of our engineers!
Enjoy the 2020 Virtual Engineering Design EXPO!
Kevin Shanley, Chair
Division of Engineering Programs
Thank you to our 2020 EXPO Sponsors:
Megawatt Sponsor

Kilowatt Sponsor

Watt Sponsor

Team 1
OPEN SOURCE POWDER PRINTER
Ryan Coffin (EE), Rachel Eisgruber (ME), Justin Henix (ME), Joshua Raber (CE),
Hadi Rabadi (ME), Michelle Wong (ME)
Advisors: Dr. Jared Nelson with Aaron Nelson
Binder Jetting technology was patented in 1993 by the Massachusetts Institute of Technology [1]. It is different from the Fused Filament Fabrication (FFF) printers used commonly across SUNY New Paltz in that it is a method where 3D objects are created using a powder and binding liquid. Fused Filament Fabrication is the process by which heated plastic is extruded through a nozzle and deposits it into thin layers that create a 3D object [2]. Alternatively, the binder jetting method of 3D printing will produce parts with complex geometries without the use of support material. In building a printer that explores binder jetting, this can be an addition to FFF printers that future students at SUNY New Paltz can use. The goal of the Open Source Powder Printer is to build a functional printer that will initially use one type of powder for printing, shown in Figure 1.
The electrical, mechanical, and software design of Ytec’s original printer has been altered and improved upon. Electrical designs have been improved by updating the printed circuit board track layout, as well as the speed of the printer. Mechanical design improvements have been done by increasing the build volume. Computer engineering software has been improved by updating the user interface of the OASIS source code. Ytec’s original powder printer design will also be improved in a sustainable manner in which binder liquid will be conserved after each print. Following the completion of the open-source powder printer, it will be utilized by the Hudson Valley Additive Manufacturing Center (HVAMC) for student and client use.
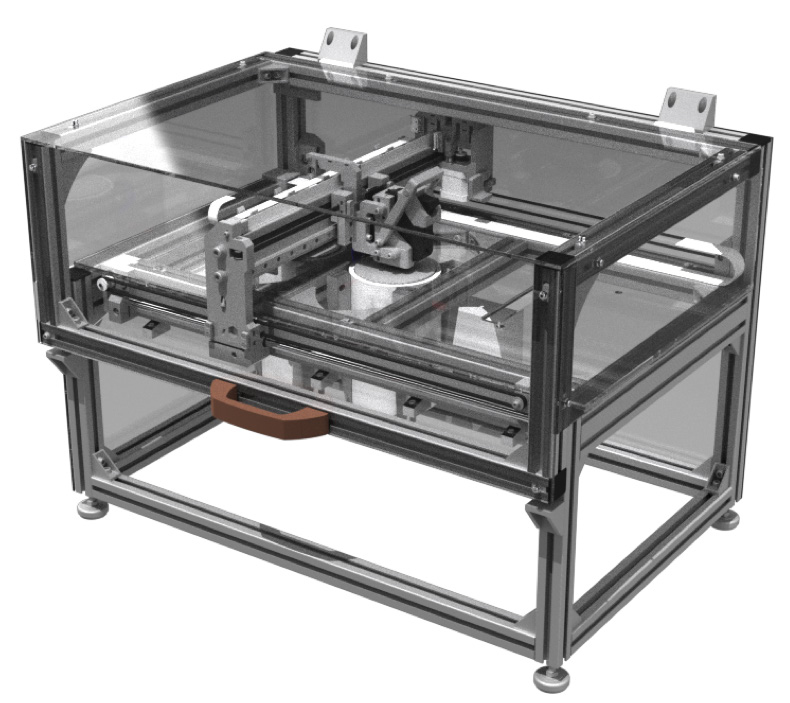
Figure 1: Rendering, Open Source 3D Powder Printer, OASIS
Citations:
[1]”Amended and Restated Exclusive Patent License Agreement”. www.sec.gov. Retrieved June 24, 2019.
[2] “Fused Filament Fabrication/FFF – 3D Printing Simply Explained,” All3DP, 01-Feb-2019.
Team 2
OBSTACLE DETECTION DEVICE FOR THE VISUALLY IMPAIRED
Liam Caufaglione (CE), Jessy Li (ME), Maritsa Rehma (ME), Lars Stoeckhert (ME)
Advisor: Dr. Damodaran Radhakrishnan
Co-Advisor: Dr. Ping-Chuan Wang
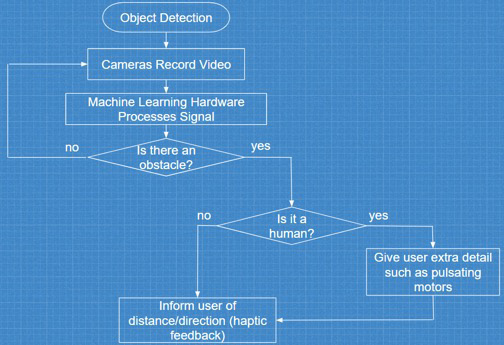
Figure 1: High Level Overview of Device’s Operation
Team 3
OUTDOOR SPACE COOLER
Kevin Harjes (ME), Joseph Marchese (ME), Brendan French (ME),
Raymond Lee (CE), Kyle Plechaty (ME)
Advisor: Leila Mehraban Alvandi
Co-Advisor: Dr. Rachmadian Wulandana
The purpose of this project is to decrease the thermal discomfort of high-temperature outdoor spaces with the use of a 1-2-person capacity two-stage cooling system. The first stage will incorporate an evaporative cooler using CELdek porous media. The second stage will incorporate a conventional 12000 BTU upright air-conditioning unit. Testing of the air conditioning unit proved to effectively cool incoming air at 30 degrees Celsius and 40% relative humidity. The refrigeration system provides a steady state outlet temperature of approximately 15 degrees Celsius and air velocity of 8.3 m/s. Most of the power consumption at full load, approximately 1400 W, is input to the compressor of this air conditioning unit. The addition of a passive evaporative cooler to the inlet stage of the unit decreases the temperature of the inlet air as shown by the evaporative cooling arrows in the process diagram Figure 1. In dry conditions this maintains or increases the refrigeration effect while consuming much less energy. The control system of the unit is designed using fuzzy logic, which can analyze temperature and humidity and output the required protocols for compressor speed, fan speed, and damper and valve positions in order to reach the desired climate. Therefore, the energy consumption of the unit is further reduced by providing the most efficient logic for each condition and sending power only where it is necessary. The cooled air is dispersed over the occupants under a canopy, increasing thermal comfort for those enjoying an outdoor space on a day where air temperatures are high.
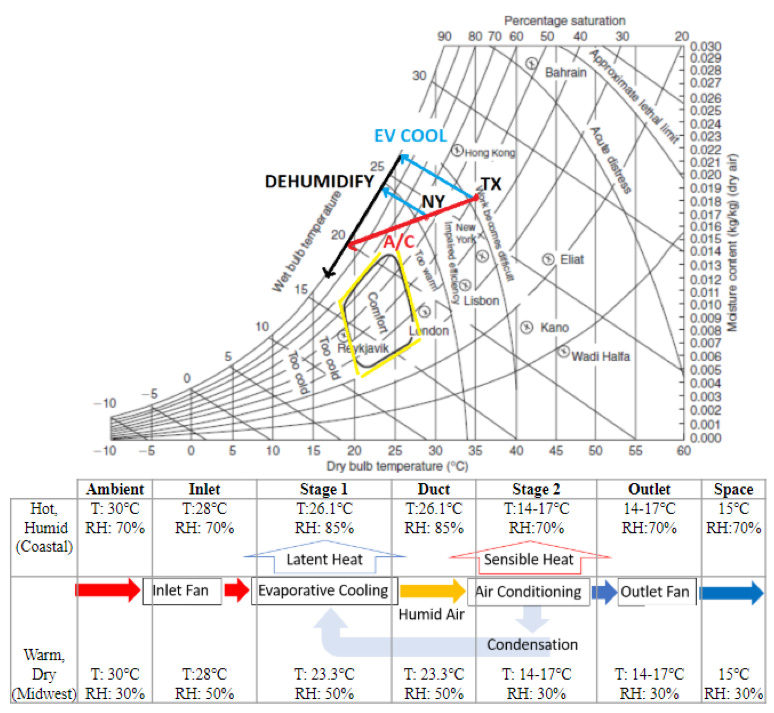
Figure 1: Cooling process diagram
Team 4
NEAR FIELD COMMUNICATION RING MEDICINE DISPENSER
Rocco Landi (EE), Tyler Corsette (ME), Anthony Mazzurco (EE),
Arthur Vakarchuk (ME), Patricio Guerron (EE)
Advisors: Michael Otis with Eric Myers (Physics)
Medical technology has advanced to a point where medicine access is restricted to those that would abuse it. Our engineering team is designing a way to limit access to highly powerful and addictive medicine. This device requires the patient or user to use an NFC ring to access the prescribed medicine such as pills. Figure 1 below, is a flow diagram which shows how a patient or homecare provider will be able to access the proper medication at the proper time of day. The dispenser will be programmed remotely by a technician following a patient’s medical appointment. The patient or care provider will be supplied with an encrypted NFC article of jewelry and a facial photograph shall be taken to provide for two means of authentication during allowable prescription times. The medicine will only dispense the proper dosage at the recommended times when a unique NFC chip is presented and facial recognition has been approved by the device. Prescription alerts shall be sent via WiFi to a cellular device if the medicine was not taken at the appropriate time via a scheduled task using an internal Raspberry Pi. Low level alerts shall be sent to an active technician for quick and effective refills. This limits the theft of prescribed medicine such as opioids and methamphetamines. The device also doubles as a means to help the elderly take the right amount of medicine at the correct time, to avoid medical complications. Another benefit of using this device is prevention of accidental overdose from children to elderly alike. Applications of this device include use in modern day hospitals and care facilities such as nursing homes.
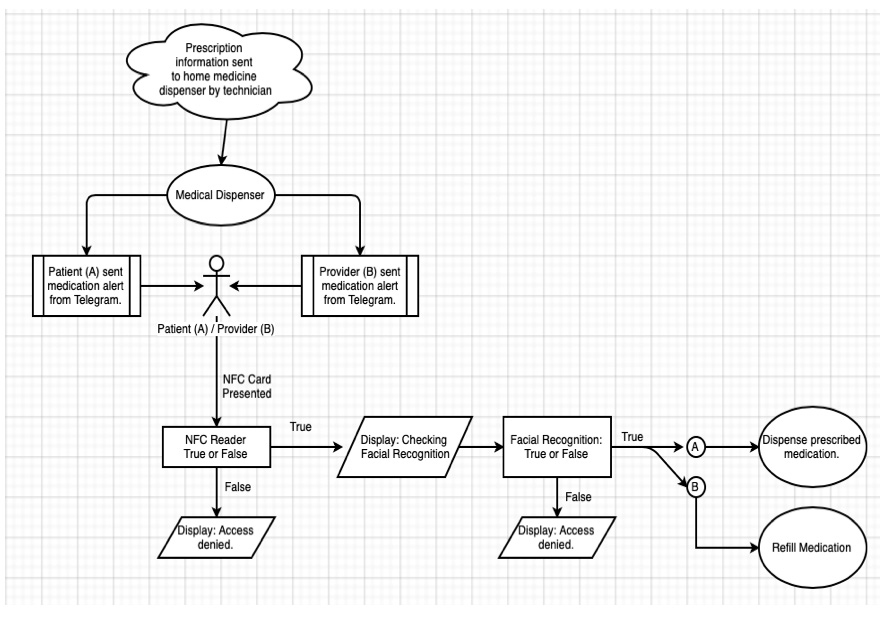
Figure 1: Medical dispenser operations flow diagram
Team 5
SAE BAJA DRIVETRAIN AND SUSPENSION DESIGN
Kevin Dart (ME), Matthew Fusaro (ME), Pedro Henriquez (EE),
Christopher Rodi (ME), Joseph Coppola (ME), Tyler Groh (ME)
Advisor: Dr. Gerald Selvaggi
SAE Baja is a global intercollegiate racing competition that requires the design, fabrication, and racing of a small off-road vehicle. The following procedure follows the design and modeling of the drivetrain and rear suspension for the vehicle. Drivetrain design was based upon optimizing high, low, and reverse gear changes within the gearbox. Further analysis followed the acceleration portion of the competition, up to 125 feet. The following gearbox incorporated the use of a continuously variable transmission as well as two synchronizers, allowing for proper meshing, and electronic solenoids. Rear suspension was modeled using Independent Rear Suspension (IRS), to allow for the rear wheels to be independently sprung. The layout of the suspension incorporated fabrication of angled control arms for non-hazardous shock placement. The suspension was designed and reverse engineered, in order to allow for the vehicle’s endurance and strength throughout the competition. Vehicle suspension testing was completed utilizing scaling as well as failure analysis. ANSYS and SolidWorks structural analysis were completed on the frame and rear suspension. Gear ratio calculations were formulated and utilized in the design of the gearbox. A comprehensive design approach can be seen in Figure 1 below.
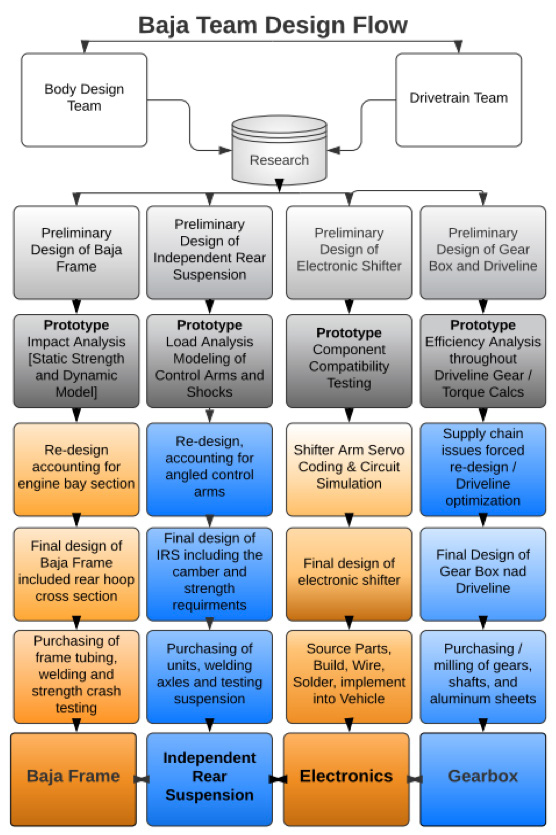
Figure 1: Design Flow Block Diagram
Team 6
VIRTUAL UNIVERSE: CONTROL IN THE PALM OF YOUR HANDS
Michelle Pirrone (EE), Matthew Letterese (CE), Richard Martino (EE),
Vito Ciraco (EE), John Murphy (ME)
Advisor: Dr. Reena Dahle
Virtual Reality (VR) is a technology that allows a simulated, interactive experience in a digital environment. This technology has generally been used to immerse and enhance a player’s experience in video games but has been expanding its applications in fields such as medicine and education. Examples of this include surgeons having virtual, interactive and 3-D preparation before surgery and educators incorporating simulated labs to further engage student interest and understanding in fields which may otherwise be inaccessible. However, current VR devices available on the market are only capable of reading hand movements displayed in a digital environment and do not measure other quantifiable metrics like grip strength or hand acceleration; essential for finer hand coordination, typically needed by a surgeon. In addition, devices on the market are expensive, must be held like a controller, or are in the experimental phase generally inaccessible to consumers. Increasing the affordability, accessibility, and range of variables measured in VR technology will allow it to be used by a wider range of consumers and applications.
Virtual Universe is an affordable and wearable Internet of Things (IoT) glove and sleeve developed to address the shortcomings and expand the use of current virtual reality devices. This device is embedded with an accelerometer and gyroscope (the MPU-6050) to record position and acceleration, a MyoWare Muscle Sensor to measure force in the forearm, and motors on the fingers to receive vibrational haptic feedback. It also houses an ESP32-S microprocessor as the central processing unit between the sensors, motors, and computer system. Hand movements are captured using a combination of Tensorflow and MediaPipe machine learning programs, which track the hand in real-time and display the output on a computer. Figure 1 is an example of the prototype and a block diagram of the system that illustrates how information is received and displayed. The measurements from the sensors are sent to the ESP32-S, which relays this information to an interface and creates a feedback system with vibrations using the readings of the MyoWare Muscle Sensor. This device could then be integrated with an open source developer platform such as Unity to be customized to the user’s application. Virtual Universe provides a framework for virtual reality developers to capture hand movement and force and is wearable and affordable for a wide range of consumers to interact with VR technology.
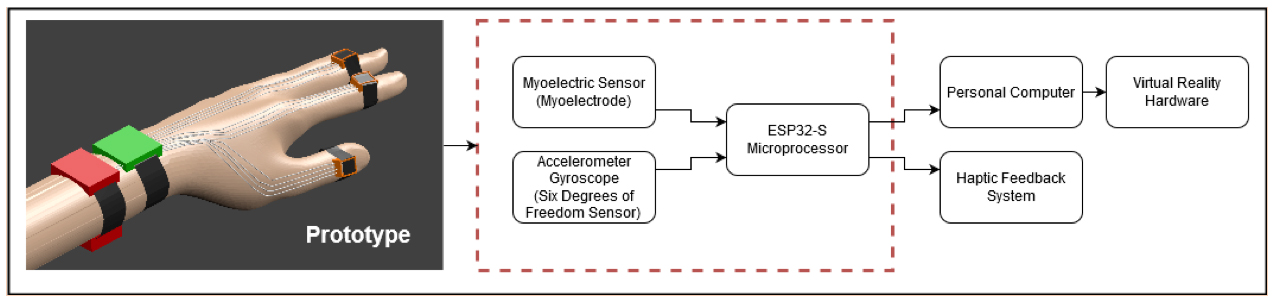
Figure 1: Rendering, Open Source 3D Powder Printer, OASIS
Team 7
AUTONOMOUS LAWN MOWER
Katie Russell (EE), Tristan Judd (CE), Kurt Pressly (EE),
Chelsea Angulas (ME), Michele Lederer (ME), Matthew Pero (ME)
Advisor: Dr. Baback Izadi
Co-Advisor: Dr. Jared Nelson
Autonomous lawn mowers are an emerging technology that show large potential for future implementation in the lawn care industry. Most current models require an electrified guidewire to be installed to constrain the mower’s movements on the user’s lawn. This project removes the required guidewire using a GPS mapping system and an algorithm to plot the lawn mower’s path as it navigates the lawn. The model is composed of PVC piping with secure, protective housing for the electrical components. The CAD model of the design is shown in Figure 1. Manual control is used for initialization of the robot through an Android application. The robot utilizes Movidius, a neural compute stick from Intel with built-in AI, to enhance the object detection and machine learning capabilities of the autonomous unit, increasing efficiency and accuracy for each run. The developed algorithm using Python language for the Raspberry Pi stores information as the lawn mower traverses the area. Such information includes GPS locations of obstructions, the area of the lawn, and any errors or new obstacles the lawn mower encountered on its last run. This information is used to mow the lawn in straight lines with the most efficient mowing route, reducing cost and labor.
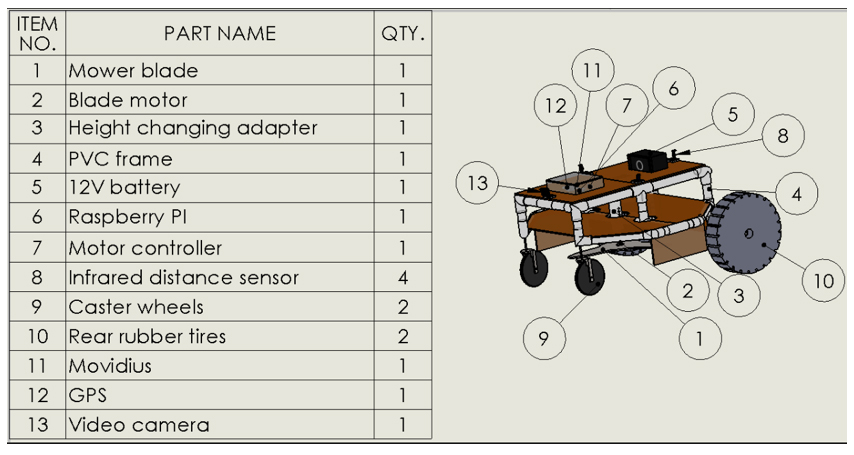
Figure 1: Annotated CAD Model of Autonomous Lawn Mower
Team 8
UNIVERSAL TEST FRAME
José Alarcon (ME), Michael Bianco (ME), Louis Pate (ME), Sona Sharan (ME)
Advisor: Dr. Jared Nelson
A universal test frame was required by the Division of Engineering Programs at SUNY New Paltz to perform various material and strength testing on specimens for personal research and lab courses. The team assembled the final frame design, as well as a detailed instruction manual for assembling and disassembling the frame. Various static simulations were performed on SOLIDWORKS and ANSYS in order to ensure negligible deformation and yielding within the frame. This was an essential step to prove that the data obtained from tensile testing will not be skewed due to frame deformation. Simulations proved that the experienced stresses are lower than the yielding stress of the steel frame, ensuring exceptional durability and functionality for the foreseeable future. The simulations were run for a plethora of materials in order to obtain an understanding for which material provided the least deformation and internal stresses within the members. Additionally, the team designed a clamping mechanism to properly secure the test specimen to the frame. A 3D printed prototype for the clamp was created however, due to unforeseen circumstances, a machined clamp has not yet been made. The 3D CAD files are readily available, meaning the clamp may be machined in the future. Simulations were also conducted on the clamp in order to ensure its stability and structural integrity while fastening the test specimens to the frame. Screen shots of designs for the frames and the clamps can be observed in Figure 1. Finally, an instruction manual was printed so students and staff may assemble, disassemble, or even construct a new frame. This document paves the way towards continuous improvement for the universal testing frame.
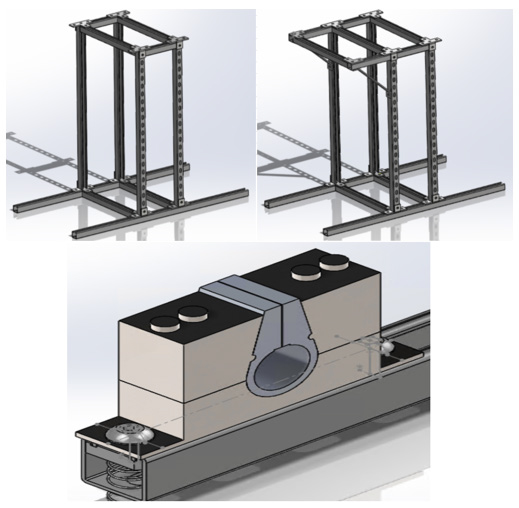
Figure 1: Frame and Clamp Designs via SOLIDWORKS
Team 9
STATERA: THE SELF-BALANCING BALLBOT
Samuel Henderson (ME), Samantha Sanders (CE), Alexander Estrella (CE),
Ernest Perez (CE), Joseph La Touche (EE), Sean Ryan (ME)
Advisor: Dr. Damodaran Radhakrishnan
Co-Advisor: Dr. Rachmadian Wulandana
Statera is a self-balancing ball riding robot that will use the Raspberry Pi 4 single-board computer to maintain dynamic equilibrium. As shown in Figure 1, the system receives serial data input containing angular displacement from a gyroscope in order to determine the current system state. For the current state, the correct motor response is determined by solving Euler’s equations of motion with a Python program. The program then outputs driving signals to three NEMA 17 stepper motors with gearbox attachments, each independently controlled by a potentiometer and DRV8825 driver. The system also includes multiple HC-SR04 ultrasonic sensors to determine distance from obstacles while in movement. Data pertaining to gyroscope readings, ultrasonic sensor readings, and motor state are logged to a database and a server posts that data to a website hosted on the Raspberry Pi. The Statera ballbot design utilizes a lithium-polymer battery with a robust design and high-power output, allowing for a high discharge rate when required with a lengthy run-time. Statera is a framework for an inexpensive and highly mobile assistive robot that can offer support to users in their day-to-day functions.
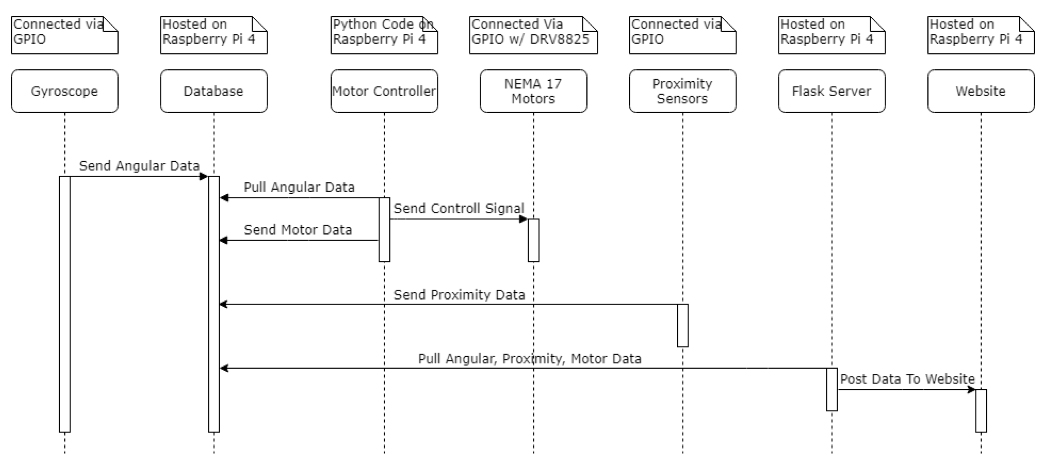
Figure 1: Sequence Diagram of System
Team 10
ALL SPOOLED UP
Ian Lorber (ME), Chris Lopez (ME), Richard Moretti (ME)
Advisor: Dr. Ping-Chuan Wang
The machine designed in this project recycles scrap PLA plastic commonly used in FDM 3D printers so the material can be reused to print more parts. This machine will help make additive manufacturing a more sustainable method of design by reducing the waste that comes with failed parts. The heating chamber turns the solid plastic into a viscous form which is extruded out of a nozzle, cooled and then spun onto a new spool by the spool winder. This process is displayed in the block diagram in figure 1 below. Through testing it was found that grinding up the plastic into small chunks was the most effective method for melting the plastic. Upon testing the initial prototype some of the ground-up plastic parts did not melt fully, causing jamming in the heating chamber as the material was being extruded. This was due to improper insulation of the heating chamber as well as the speed the plastic was traveling through the heating chamber. In this presentation, this issue will be discussed, including (1) improving the heating chamber for better temperature uniformity and (2) adjusting the auger speed for more effective heating and proper viscosity consistency.
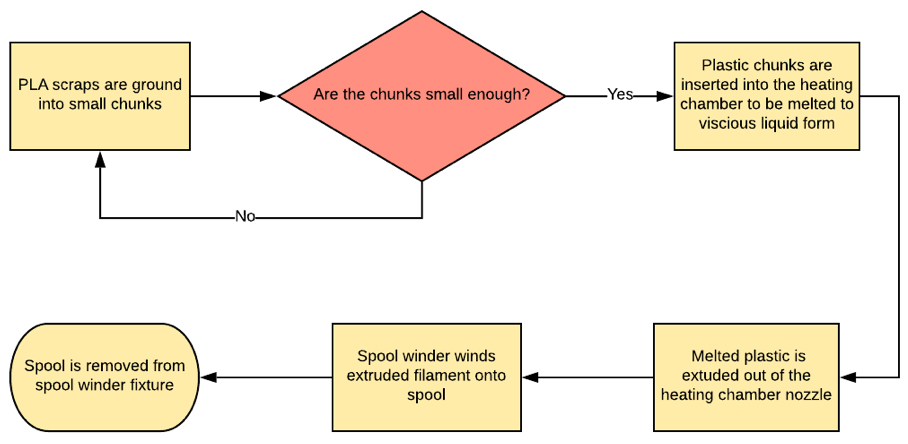
Figure 1: Block diagram outlining the processes of the machine
Team 11
MODERNIZATION OF THE UNISON ARTS CENTER
Alexis Bruno (ME), Haley Rosenblatt Niggl (CE), Zachary Johnson (ME),
Kevin McCann (ME)
Advisor: Dr. Rachmadian Wulandana
Co-Advisor: Mike Otis
Stakeholders: Alexandra Baer, Director of Unison Arts Center
The Modernization of the Unison Arts Center features engineering designs for the Unison Art Center of New Paltz, NY. As represented by Figure 1, this multidisciplinary capstone project includes designs of a radiant floor heating system for the center’s main showcase room, feasibility studies of solar and geothermal energy systems for heating and energy supply, designs of outdoor drainage and lighting systems furnished with smartphone control apps, and the digitalization of the center’s building plans. All designs were focused on the principles of sustainability, cost effectiveness, and overall environmental impact. The radiant floor heating system is a split loop design that consists of over 250 feet of copper heating pipe. This system was proposed to replace the above-ground column style radiators that currently exist in the main showcase room where events such as live summer concerts and art exhibitions are held. The feasibility study led to the recommendation of the installation of five (5), 90-Watt solar panels. On an ideal day, this system will be able to capture anywhere from 3.5 to 6.7 kW of electricity. The drainage system design consists of over 400 feet of drainage pipe and is modeled around the footpaths within the sculpture garden. The smartphone control app will allow center administration to control indoor and outdoor fixtures through Bluetooth technology.
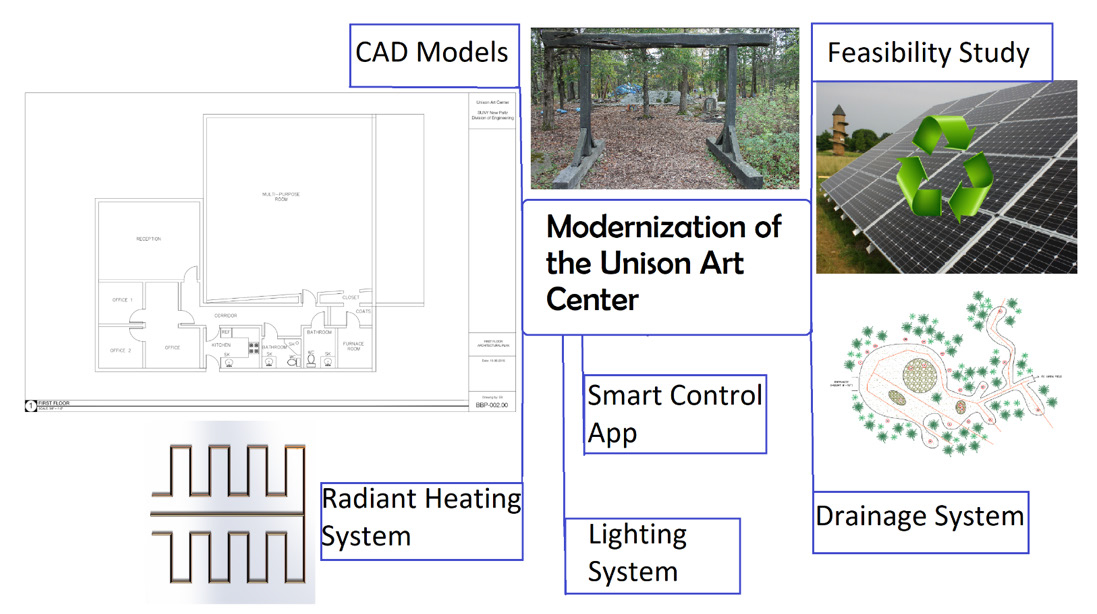
Figure 1: Sections of Multidisciplinary Project
Team 12
SMART OUTDOOR CHAIR
Quentin Owusu-Adjei Thomson (CE), James Luong (EE), Michael Perez (EE),
Syed Walid (CE), Bryce Shannon (ME)
Advisor: Dr. Gerald Selvaggi
Stakeholders: Oliver Engel, Mettrix Technologies
The project design will be a smart outdoor chair. This chair will initiate a signal when it is exposed to a water source such as rain droplets. It is designed to automatically protect the interior cushion from any water damage. This will be done by having the back of the chair close onto the seat cushions of the chair, so the only part exposed is the protective material (Figure 1). The objective is to test the efficacy of the chair in handling an external water source and to better its performance, so it will be ready and safe for user interaction. In order to accomplish this, the focus of this semester was to build the final design for the chair’s frame, add more water sensors to improve functionality, and complete the closing mechanism for the back of the chair using servo motors. Additionally, the application of Arduino technology will be used to control the chair’s behavior when exposed to an external water source. Lastly, by the time of the expo, the chair will be complete and safe for users to interact with.
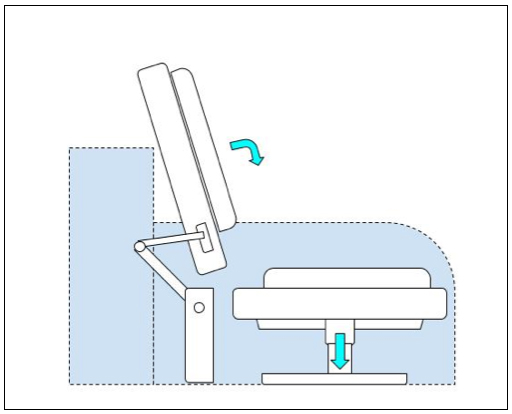
Figure 1: Chair Closing Mechanism
Team 13
RECOVERING THERMAL ENERGY
FROM AN INTERNAL COMBUSTION ENGINE
Guillaume Pineau (ME), Matthew Clark (ME), Jacob Viertel (ME), Michael Weinert (ME)
Advisor: Dr. Rachmadian Wulandana
The Internal Combustion (IC) engine has an abundant number of applications in many different industries. Hence, IC engine fuel consumption is extremely important. There is continuous research in progress to reduce fuel consumption and increase power output. The goal of this project is to further improve IC engine fuel economy by recovering and repurposing thermal energy from the exhaust system of an IC engine. Exhaust gas exits an IC engine through the exhaust piping and dissipates into the air. This exhaust gas contains a large amount of thermal energy which has the potential to be recovered, stored, and ultimately, repurposed to improve the efficiency of an IC engine. Exhaust thermal energy was harnessed through the use of an air to water heat exchanger to generate high pressure steam, serving many potential uses. Kinetic flow energy from the high-pressure steam was used to drive a turbocharger and increase IC intake air pressure. This resulted in a turbocharging method with no consequential power loss due to pulley load or backpressure. This method can successfully recover thermal energy by means of steam generation, and specifically, yield a more efficient turbocharged IC engine for use in high power output applications. In testing, the exhaust temperatures exceeded 560 degrees Fahrenheit; this induced a steep temperature gradient allowing energy to transfer to the boiler, ultimately producing steam at pressures around 30 PSI.
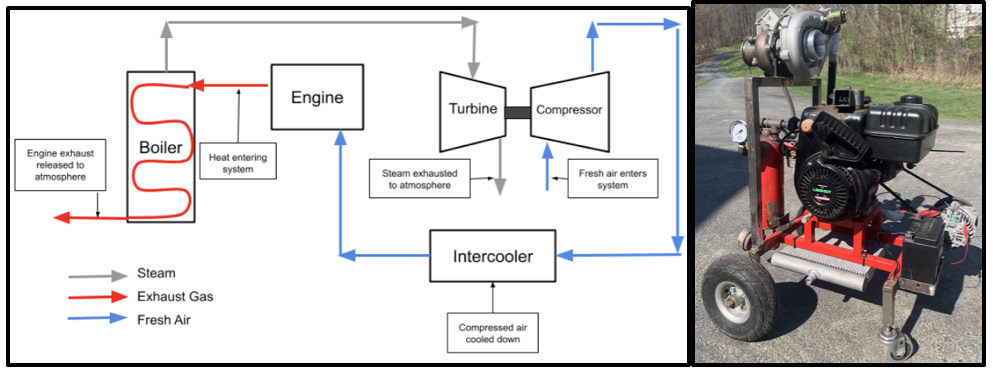
Figure 1: (Left) Steam turbine thermodynamic system flow chart
(Right) Regenerated steam boiler and turbine
Team 14
HIGH ALTITUDE WORKING STATION (HAWKS)
Matthew Lemke (ME), Tasnimul Sakib (EE), Jubitana Antoine (EE),
Jefferson Salto (EE)
Advisors: Dr. Kevin Shanley with Eric Myers (Physics) and Larry Queipo
The High Altitude Working Station (HAWKS) project, is a mission which requires the use of a High Altitude Balloon (HAB) to carry a payload to an altitude of around 30 km (about 100,000 ft). Its principal goal is to design and create a research platform that will allow the scientific community of SUNY New Paltz to conduct experiments at high altitude conditions. The project’s payload consists of various sensors capable of capturing information into a data logger via a programmed microcontroller, and an automated camera mount which can be controlled via Bluetooth. This project also includes a chassis which consists of a honeycomb core composite panel, to deflect any impact and shear stress to the payload. The operational system of our development is illustrated in Figure 1, where a block diagram of the designed payload is shown. Our project will sit as the foundation available to conduct future experiments, as different departments could use the established visual and technical monitoring systems, to conduct their own experiments using our platform. It is hoped that future senior design teams will build on our work.
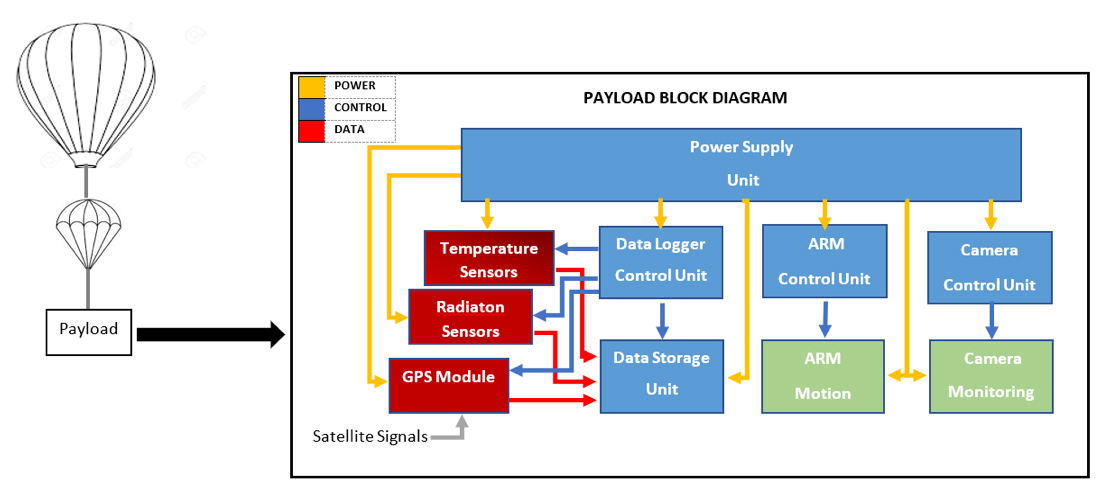
Figure 1: Block Diagram of Operating System
Team 15
SONO-TEK NOZZLE TEST BENCH
Matthew Hassett (EE), James Kurlander (CE), Ashlee Maravilla (EE),
Lina McCary (ME), David Stora (ME), Jacqueline Taylor (ME)
Advisor: Dr. Kevin Shanley
Sono-Tek is an industry leader in precision liquid application using ultrasonic nozzles. These nozzles are used by many companies in applications that require uniform, precise and repeatable coatings. Before being cleared for industry use, each nozzle must undergo rigorous testing in order to ensure that they are performing with peak efficiency and accuracy. The Sono-Tek Nozzle Test Bench is a specialized machine that tests nozzles at various electric frequencies and liquid flow rates in order to ensure that atomization is possible. The goal of this project is to redesign and improve their current nozzle test bench system for increased efficiency, effectiveness and output. Currently, Sono-Tek’s manufacturing output is being limited by their current test bench due to the number of stations, inefficient serviceability, and a lack of competent automated software. The new test bench design will allow for the calibration and adjustment of the frequency generators and gear pumps (flow rate control) that are used for testing the nozzles. The Nozzle Test Bench will also feature an integrated automated liquid delivery system that will ensure a sufficient amount of water will be provided to an array of 24 gear pumps at all times (Figure 1); removing the technician from monitoring this process. In addition to providing a sufficient liquid capacitance, the liquid delivery system also features a robust filtration system provided UV Light filtration along with mechanical filtration down to 5 Microns to ensure peak operating conditions for the tested nozzles. Additionally, the control of each station will improve via the graphic user interface developed in order to automate the control of each station. Lastly, the new design will allow for greater serviceability through modularity, allowing for easy accessibility to components in the event one needs replacing. Upon its completion, the Sono-Tek Nozzle Test Bench design will serve as Sono-Tek’s primary nozzle testing station and will be used daily for years to come.
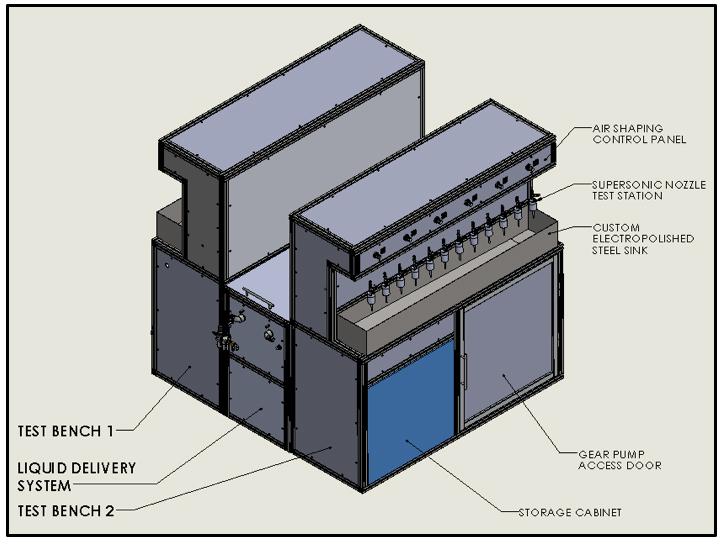
Figure 1: Isometric View of Sono-Tek Nozzle Test Bench
Team 16
MONITORING INSTRUMENTATION AND NETWORK EQUIPMENT
FOR REAL-TIME VEHICLE ASSISTANCE (MINERVA)
Jacob Bitman (ME), Issa Nesheiwat (EE), Jared Raber (CE), Roger Murillo (EE),
Tabatha Felter (EE), Beven Nedumthakady (EE)
Advisor: Michael Otis
The Monitoring Instrumentation and Network Equipment for Real-Time Vehicle Assistance (MINERVA) Project was created as a solution for amateur vehicle users. It is a data acquisition system that monitors vehicle systems and can be built on a budget using readily available parts. The system is designed to enable more thorough testing and monitoring of small, experimental vehicles.
The design consists of multiple sensor clusters, each with its own STM32 controller, connected by a Controller Area Network (CAN) bus, as shown in Figure 1. One of these controllers is connected to a RFM95W transceiver which wirelessly transmits the collected data to a remote data collection station. This, combined with the protective, thermal efficient cases designed to protect the system from harsh race conditions, is meant to protect the data in the event of a catastrophic system failure. Future developments could include developing MINERVA as a basis for vehicle control systems, such as steering and launch assist systems. This project gave us our first proper introduction to the CAN systems commonly used in modern day automobiles. Additionally, this project also taught us how to deal with unforeseen circumstances and how to work effectively as a team remotely.
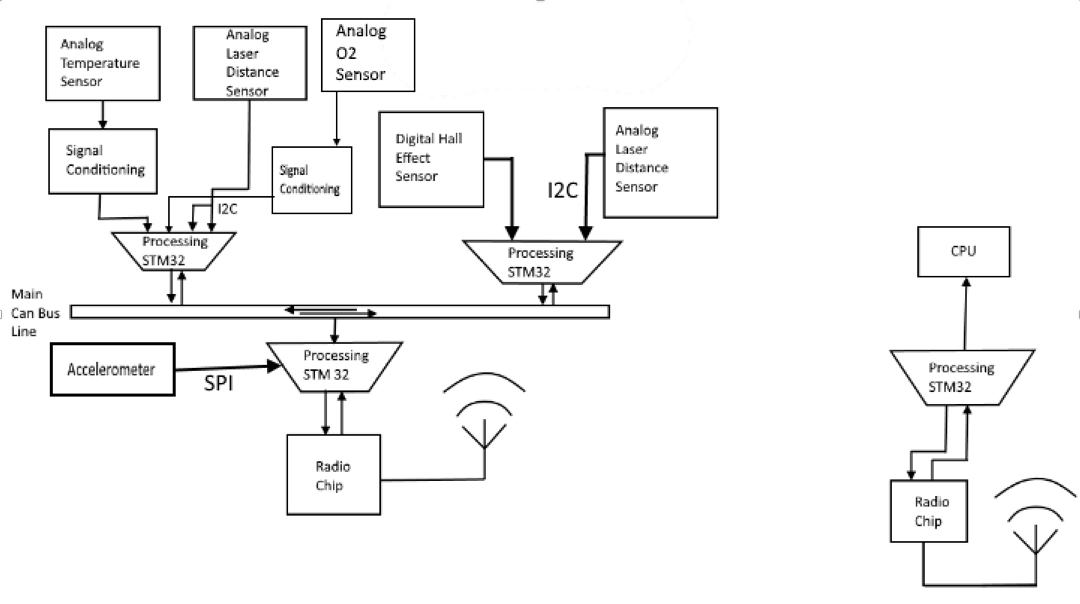
Figure 1: MINERVA System Diagram
Team 17
SMART CROSS
Kenneth Maguire (EE), Brandon McDonough (EE), Josue Morgado (ME),
Vishal Kumar (EE)
Advisor: Dr. Mohammad Zunoubi
Stakeholder: James Haggerty and Kent Gilchrest, NYS Department of Transportation
Traffic control systems are vital in the transportation field. They provide a safe and efficient means for drivers and pedestrians to travel. Currently, the New York State Department of Transportation (NYSDOT) oversees all transportation infrastructure. What this team decided was to aid the improvement of a commonly overlooked control system: pedestrian traffic control. In major cities, there is a large load of pedestrian traffic which contributes to most of the congestion in densely populated areas. In the United States alone, there are over 6,000 fatalities in pedestrian accidents per year. Therefore, the purpose of this project is to provide a more time-efficient solution for pedestrian travel while reducing all risks of pedestrian-related incidents.
Smart Cross was created with three main components: a Bluetooth and Wi-Fi mesh application, a piezoelectric plate mesh, and a printed circuit board (PCB) traffic control system. The system overall can visually be seen by Figure 1 below. Each module aids in an overall design to accomplish a safer and more efficient traffic control system. The Bluetooth and Wi-Fi mesh will scan for movement on sidewalks through tracking an array of Media Access Control (MAC) addresses that are randomized. The piezoelectric plates will provide feedback to the traffic control system to detect upcoming pedestrian foot traffic. Lastly, the PCB will control the lighting patterns of the system by taking digital inputs through Molex connectors from the other systems. These modules are housed in an electrical cabinet. In effect, these systems will provide data to adjust the traffic lights and timing coordination to provide a more safe and efficient system.
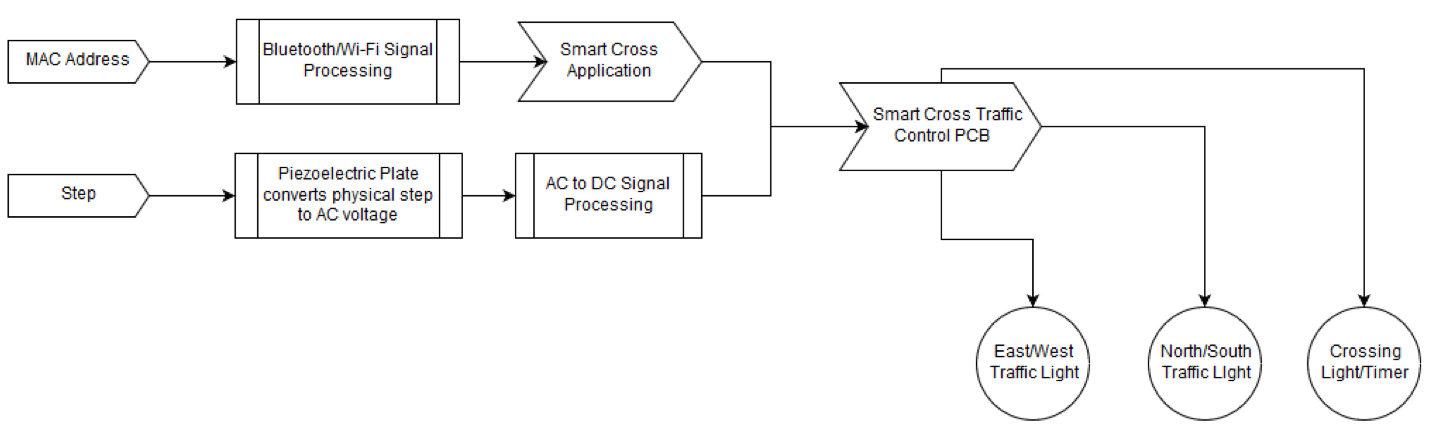
Figure 1: Overall Signal Flow Path
Team 18
BIOMETRIC IGNITION INTERLOCK
Kevin Puerschner (EE), Henry Montero (EE), Brian Castillo (ME), Christopher Dyer (CE)
Advisor: Dr. Gerald Selvaggi
Nearly a third of all accidents on the road are caused by drunk drivers. A fourth of all fatalities on the road are caused by drivers under the influence of alcohol. Unfortunately, many of these drunk drivers are repeat offenders and have at least one DWI/DUI on their driving record. For this reason, this senior design project creates an innovative solution to cease this issue. The Biometric Ignition Interlock Device system requires a breathalyzer in the vehicle of the drunk driver and a compatible cellphone application readily available on the app market. Anyone with a DUI on their record, with the approval of a probation officer, will have this device installed on their vehicle. The device consists of an Arduino, Bluetooth adapter, and MQ-3 alcohol sensor enclosed in a 3D printed case. In order to turn on the vehicle, the driver will first have to open the phone application and log in to the facial recognition app. From there, the driver will start a facial scan with the appropriate permission of the front-facing camera of the cell-phone. A facial scan will then follow to show proof of identity. If the facial scan fails, the breathalyzer scan will fail automatically and a red LED light will be shown. In addition, the car will not start and a direct message will be sent to a probation officer. If the facial scan passes, the driver will then proceed to the breathalyzer that is connected to the vehicle interlock system. When the breath scan is passed, the vehicle will start. Regardless of a pass or fail, the data will be stored for record purposes. Figure 1, below shows a block diagram of the project. This project is important as it will decrease the number of drunk drivers on the road and make the streets safer for everyone.
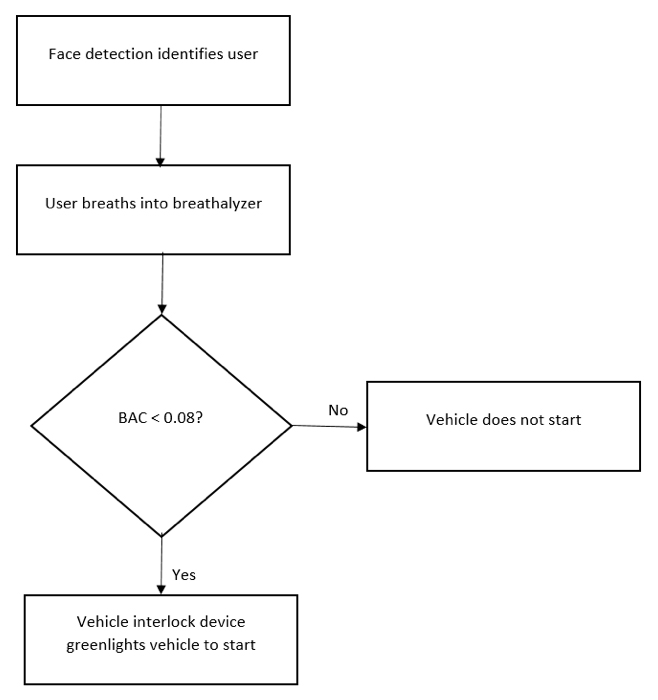
Figure 1: A front-facing facial recognition proceeds to an MQ-3 alcohol breath scan
that then allows the program code to deliver a response to the ignition interlock
Team 19
MPI VISCOSITY CONTROLLED WAX INJECTION
Peter Pasqualino (EE), Myles Barcelo (CE), Christian Valentin (ME),
Liam Weeks (ME), Graham Werner (ME)
Advisor: Dr. Heather Lai
Stakeholder: Aaron Phipps, MPI
The Viscosity Controlled Wax injection project proposed by Stakeholder Aaron Phipps, the Vice President of Engineering and Manufacturing at MPI Inc., aimed to provide greater control over the wax injection process. For the duration of this project, our team designed a capillary rheometer as a viscosity sensing device to be attached to a Model 55 Series wax injector.
MPI Inc. is a world leading manufacturer in investment casting and automation for a diverse range of clients within the medical, construction, and automotive industry. The goal of improving the efficiency of their wax injection process was achieved with a unit that measures the pressure drop through the capillary at a flow rate, so applied shear stress, shear rate, and therefore viscosity of the wax, can be calculated. The material’s state of thickness varies with temperature and pressure, so recorded numerical data relative to a given batch and cycle allows for more precise temperature adjustments towards an appropriate viscosity for a desired cast. This reduces potential scrap produced during the investment casting process and increases the overall consistency of part manufacturing.
The outbreak of COVID-19 prevented the implementation of our design at MPI’s facility, as Figure 1 shows, for on-site testing of accuracy and precision of measurements and repeatability of the capillary rheometer. When pandemic-based barriers are removed, our project will be used to improve the efficiency of their wax injection process, based on the viscosity of wax.
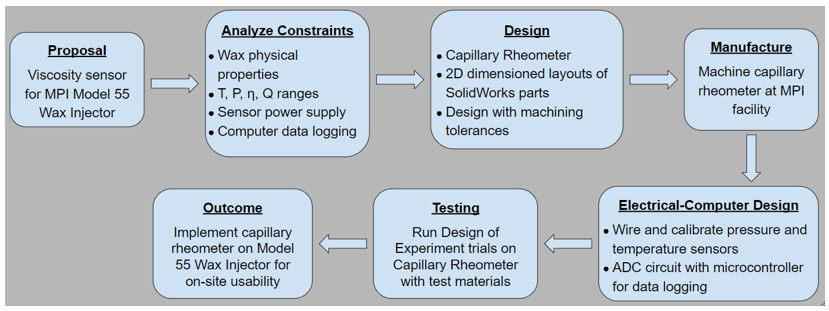
Figure 1: Senior Design II Diagram
Team 20
SMART PARKING
Javier Padilla (EE), Atta Boateng (EE), Deluxsheka Ramanathan (EE)
Advisor: Dr. Ghader Eftekhari
Finding a parking space is an on-going struggle for modern drivers. It takes a lot of time to find a parking spot, which often gives people numerous problems every day. This project makes. The information from the camera will send the parking spots available to the display board in front of the parking lot. This will notify the drivers of open spots. Since the display is only showing the available spots, the incoming traffic will see what spots are available before looking for a parking space. This will cut back on the amount of time spot. Examples of this do exist, however, they are very complex and only watch over a few cars. The crucial factors of this kind of parking system help minimize carbon emission, reduce traffic congestion and save time and fuel because the camera observes all cars in the lot. It will know what spots are open, allowing drivers to go to one of those spots. Figure 1 shows how this process works.
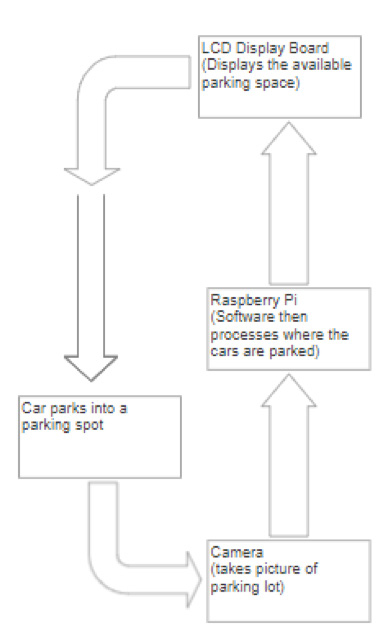
Figure 1: Block Diagram of how the parking lot works
